

1.Présentation du robot Thymio:
Thymio est un robot programmable. Il peut se déplacer en autonomie en détectant son environnement et en réagissant à cet environnement en fonction du programme qui est implanté dedans. Un robot est un dispositif alliant mécanique, électronique et informatique conçu pour accomplir automatiquement des tâches imitant ou reproduisant, dans un domaine précis, des actions humaines.Il peut être utilisé pour différentes raisons:
-Effectuer des tâches dangereuses à la place de l’homme (explorer la planète Mars, visiter des égouts, peindre des voitures dans une usine,…)
-Effectuer des tâches répétitives (machine à laver, robot aspirateur,…)
-Sécuriser le transport (métro sans chauffeur, voiture autonome, pilote automatique des avions,…)-Se distraire (robot jouet, programmation,…)
-Améliorer la communication (accueil dans les magasins, robot parlant,…)
Vous trouverez le site officiel en cliquant sur ce lien : https://www.thymio.org/fr/
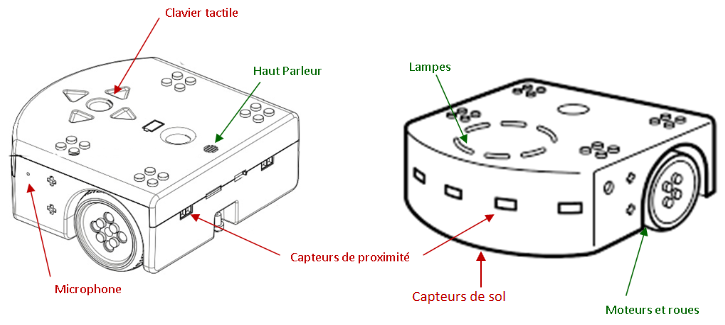
2.Capteurs et Actionneurs:
Tous les composants électroniques et mécaniques sont reliés à la carte programmable qui est l’élément principal du Thymio. On les appelle:
-des Capteurs si ils permettent de faire entrer des informations dans Thymio.
-des Actionneurs si ils permettent de faire sortir des informations de Thymio.

3.Programmation:
Pour réaliser les tâches demandées, l’utilisateur doit programmer Thymio. En utilisant Blockly, le programme est simplifié. Les instructions sont représentées par des blocs qui s’emboitent les uns dans les autres.

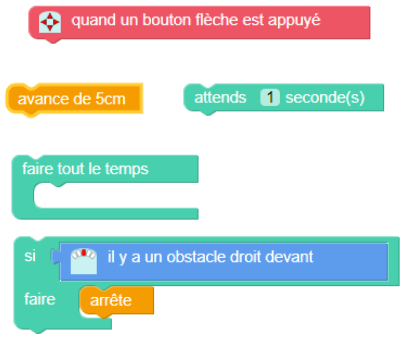
Un évènement: le programme démarre lors d’une situation précise.
Une action: Ce que doit faire le robot
Une boucle: l’action se répète plusieurs fois ou tout le temps
Une condition: Si………alors……..Capteurs de sol
Aide pour le TP: programmer le robot thymio
Mission 5: thymio devra dans un premier temps dessiner un carré puis vous essayerez de faire comme l’exemple de la vidéo.

Mission 6: Les notes pour « au clair de la lune » sont les suivantes :
Sol sol sol la si la sol si la la sol Sol sol sol la si la sol si la la sol La la la la mi mi la sol fa# mi ré Sol sol sol la si la sol si la la sol.
d’autres musiques :
Indiana Jones : mi fa sol do re mi fa mi sol la si re mi fa
Harry potter : sib mib sol fa mib sib la fa mib sol fa re sol si
Wellerman : mi la la la la do mi mi mi fa re re mi fa sol mi mi mi la la la si do mi mi mi mi re do si la
Game of throne : sol do mib fa sol do mib fa sol do mi fa re sol si do re sol do re sol

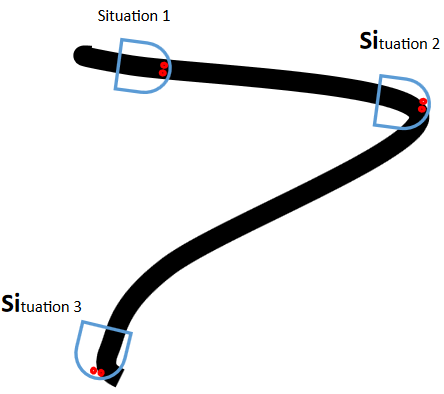
Mission 7: (1)Dans le programme, le robot utilise 2 capteurs de sol en vérifiant «Noir ou Blanc?». Le robot avance si les deux capteurs sont sur la ligne noire. (2) Sile capteur gauche voit du blanc alorsil faut le ramener légèrement à droite et inversement. Il s’agit d’une Instruction conditionnelle.(3) Il faut installer une boucle infinie afin que le robot fasse ces vérifications durant tout le trajet et pas seulement une fois.
Mission 8: Pour sortir du labyrinthe plus facilement: Si le robot détecte un objet à gauche il tourne légèrement à droite pour éviter l’obstacle et inversement.Si il détecte un obstacle un peu devant sur le côté, c’est qu’il est déjà trop près de l’obstacle. Tourner de 10° risque de ne pas suffire…
